Maxi-Phyling Kayak
Maxi-Phyling Kayak
Le Maxi-Phyling est le boitier GPS polyvalent pour la collecte de données en Canoë-Kayak. Validé par la Fédération Internationale de Canoë-Kayak (ICF), il est utilisable à l'entraînement comme en compétition. Il permet d'obtenir un retour complet sur les performances d'un équipage.

L'application Phyling Kayak a été développée en collaboration avec la FFCK et l’équipe de France Olympique et offre une analyse précise des indicateurs de performance spécifiques au kayak et au canoë de vitesse. Elle permet aux entraîneurs d'obtenir un retour de l’entraînement via un module d'analyse avancé pour visualiser, comparer et traiter les données. De plus, l'application permet d'exporter les données sous forme de rapport ou de les partager directement sur des plateformes de suivi de l'entrainement comme Nolio.
Prise en main rapide
Mise en place du boitier sur le bateau
- Fixez solidement le Maxi-Phyling sur la coque du bateau à l'aide d'un scratch de type 3M
- Assurez-vous d'avoir placé le Maxi-Phyling dans le sens de déplacement du bateau
Conseil
Le Maxi-Phyling peut être placé dans un boîtier étanche (genre tupperware) pour le protéger des éléments extérieurs.
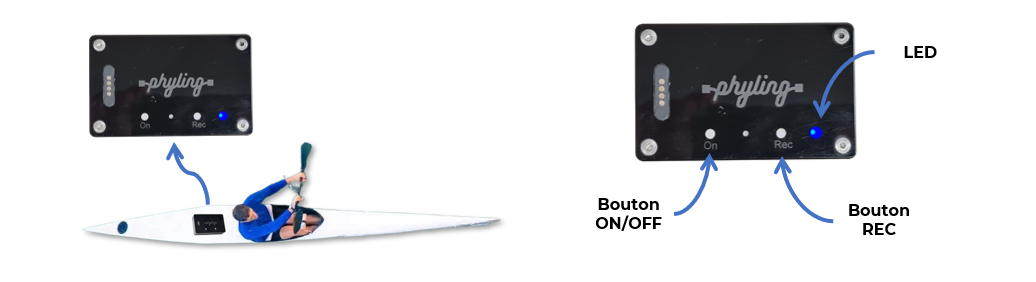
Lancer et arrêter un enregistrement
- Allumez le Maxi-Phyling avec le bouton ON (LED verte).
- Appuyez sur le bouton REC pour lancer l’enregistrement (LED bleue).
- Utilisez à nouveau le bouton REC pour mettre fin à l’enregistrement (LED verte).
- Les données sont sauvegardées dans le Maxi-Phyling et téléversées vers l’application par connexion USB ou Wifi.
Hub et Visualisation en temps réel
- Allumez le Hub, il se connecte automatiquement avec le Maxi-Phyling.
- Accédez à l’application via la connexion Wifi du Hub. Sur PC, tablette ou smartphone, dans votre navigateur, entrez l’adresse http://192.168.1.42
- Connectez-vous avec votre identifiant et mot de passe.
- La visualisation des données en temps réel se fait dans l’onglet Temps réel.
Traitement et export des données
- Retrouvez vos enregistrements dans l'onglet Données (bouton "Nouvelles données") pour les associer.
- Dans le menu Données associées, visualisez un enregistrement, créez des sélections et comparez plusieurs enregistrements.
- Exportez vos enregistrements et vos comparaisons dans différents formats : rapport PDF, données brutes, format CSV.
Données
Les données enregistrées et calculées par le Maxi-Phyling kayak fournissent des informations complètes sur le cycle de pagayage, la vitesse et la stabilité de l'embarcation. Afin de tirer pleinement parti de ces données, Phyling rend accessible les données brutes de chaque capteur. Phyling a aussi développé des analyses spécifiques pour calculer certains indicateurs.
Fréquences d'échantillonnage
| Capteur | Fréquence |
|---|---|
| IMU | 100Hz |
| GPS | 10Hz |
Les tableaux ci-dessous donnent un descriptif des variables et indicateurs calculés, ainsi que la manière dont ils ont été obtenus.
Données du fichier csv
Ces données figurent dans le fichier csv téléchargeable depuis l'application. Il s'agit de données temporelles échantillonnées à 100Hz, incluant à la fois des données brutes et des données calculées. Ce sont aussi ces données qui sont affichées sous forme de graphes dans l'application.
| Variable | Description | Unité | Calcul |
|---|---|---|---|
| T | Temps depuis le début de l'enregistrement | s | |
| gyro_x | Vitesse angulaire autour de l'axe x (axe du bateau) | deg/s | Filtre passe-haut (fc=0.2Hz, order=5) |
| gyro_y | Vitesse angulaire autour de l'axe y (axe latéral) | deg/s | Filtre passe-haut (fc=0.2Hz, order=5) |
| gyro_z | Vitesse angulaire autour de l'axe z (axe vertical) | deg/s | Filtre passe-haut (fc=0.2Hz, order=5) |
| acc_x | Accélération selon l'axe x (axe du bateau) | m/s² | Donnée brute |
| acc_y | Accélération selon l'axe y (axe latéral) | m/s² | Donnée brute |
| acc_z | Accélération selon l'axe z (axe vertical) | m/s² | Donnée brute |
| roll | Roulis | deg | Obtenu par intégration des données gyro (positif lorsque le bateau tombe à gauche et négatif lorsqu'il tombe à droite) |
| pitch | Tangage | deg | Obtenu par intégration des données gyro (positif lorsque l'avant du bateau se lève et négatif quand l'arrière se lève) |
| yaw | Lacet | deg | Obtenu par intégration des données gyro (positif lorsque le bateau tourne vers bâbord / gauche et négatif lorsqu'il tourne vers tribord / droite) |
| acc_z_ | Accélération selon l'axe z sans la gravité | m/s² | acc_z - g |
| gpstimeUs | Timestamp GPS en microsecondes depuis 1970 | microseconde | Donnée brute |
| gpsTimeAccuracyNs | Précision du temps GPS | nanoseconde | Donnée brute |
| longitude | Longitude | deg | Donnée brute |
| latitude | Latitude | deg | Donnée brute |
| speed_gps | Vitesse | km/h | Donnée brute |
| altitude | Altitude | m | Donnée brute |
| heading | Direction | deg | Donnée brute |
| nSat | Nombre de satellites | Donnée brute | |
| PDOP | Position (3D) dilution of precision | Donnée brute | |
| D | Distance parcourue | m | Calcul selon la méthode de Vincenty |
| speed | Vitesse filtrée | km/h | Obtenue à partir des coordonnées GPS (latitude, longitude). Filtre passe-bas (fc=0.5Hz, order=2) |
| speed_i | Vitesse instantanée | km/h | Algorithme de fusion entre la vitesse GPS speed et l'accélération acc_x |
| motif_id | Identifiant unique pour chaque coup | Détection des coups à partir du signal d'accélération acc_x | |
| cadence | Cadence en coups/min | cpm | A partir de la durée de chaque coup de pagaie |
| pic_acc | Pic d'accélération | m/s² | max(acc_x) pour chaque coup de pagaie |
| pic_down | Pic de décélération | m/s² | min(acc_x) pour chaque coup de pagaie |
| t_acc | Durée de la phase d'accélération | s | T[acc_x > 0] pour chaque coup de pagaie |
| t_down | Durée de la phase de décélération | m/s² | T[acc_x < 0] pour chaque coup de pagaie |
| amp_roll | Amplitude de roulis | deg | max(roll) - min(roll) pour chaque coup de pagaie |
| amp_pitch | Amplitude de tangage | deg | max(pitch) - min(pitch) pour chaque coup de pagaie |
| d_stroke | Distance par coup | m | Calcul à partir de la vitesse et de la cadence |
| timestamp | Timestamp depuis 1970 | s | Si GPS, simple conversion de gpsTimeUs ; sinon on utilise le temps du Maxi-Phyling |
Indicateurs
Les indicateurs sont des statistiques qui caractérisent l'ensemble d'une sélection. Dans l'application, ils apparaissent dans le tableau "Indicateurs" et ils apparaissent également sur la première page des rapports pdf.
| Variable | Description | Unité | Calcul |
|---|---|---|---|
| D_tot | Distance totale | m | D[-1] - D[0] sur la sélection |
| T_tot | Temps | T[-1] - T[0] sauf si un temps chrono est fourni par l'utilisateur | |
| v_moy | Vitesse moyenne | km/h | D_tot/T_tot |
| v_max | Vitesse maximale | km/h | max(v) |
| loss | Indice de perte qui caractérise la perte de vitesse après avoir atteint v_max | % | Ratio d'aires à partir de v_max:100 * (1 - integral(v[imax:], x=T[imax:]) / (v_max * (T[-1] - T[imax]))) |
| cad_moy | Cadence moyenne | cpm | moy(cadence) |
| cad_max | Cadence max | cpm | max(cadence) |
| d_stroke | Distance moy /coup | m | A partir de v_moy et cad_moy |
| n_vmax | Nombre de coups pour atteindre v_max | ||
| t_vmax | Temps pour atteindre v_max | s | |
| d_vmax | Distance pour atteindre v_max | m | |
| t_95vmax | Temps passé à plus de 95% de v_max | s | |
| d_95vmax | Distance parcourue à plus de 95% de v_max | m |
Rapport pdf
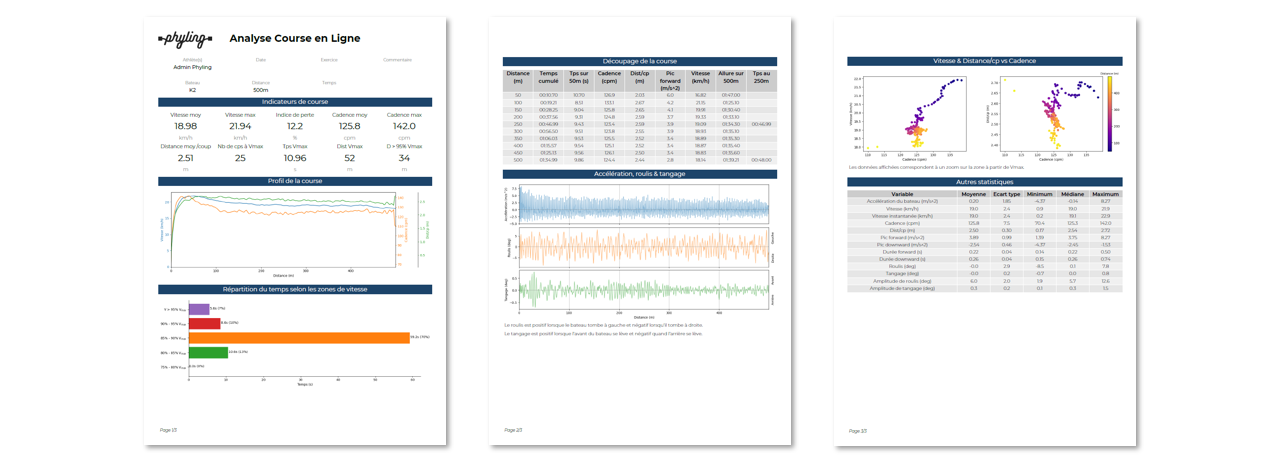
Le rapport PDF d'après course en Canoë-Kayak offre aux entraîneurs une multitude d'informations pour analyser les performances de leurs embarcations à l'entrainement ou en compétition. Il fournit des indicateurs sous forme de valeurs et de graphiques, notamment le profil cadence-vitesse sur l'ensemble de la course, la répartition détaillée du temps passé dans les différentes zones de vitesses et un découpage de la course en segments.
Explications
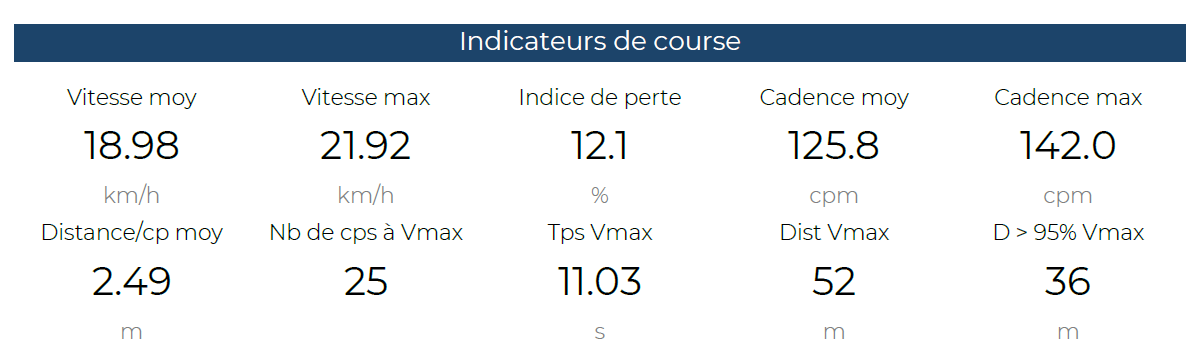
La section des Indicateurs de course fournit les indicateurs clés pour la sélection choisie (ici une course de 500m, il peut s'agir aussi d'un exercice au cours d'une séance d'entraînement). Le détail des indicateurs est donné ici.
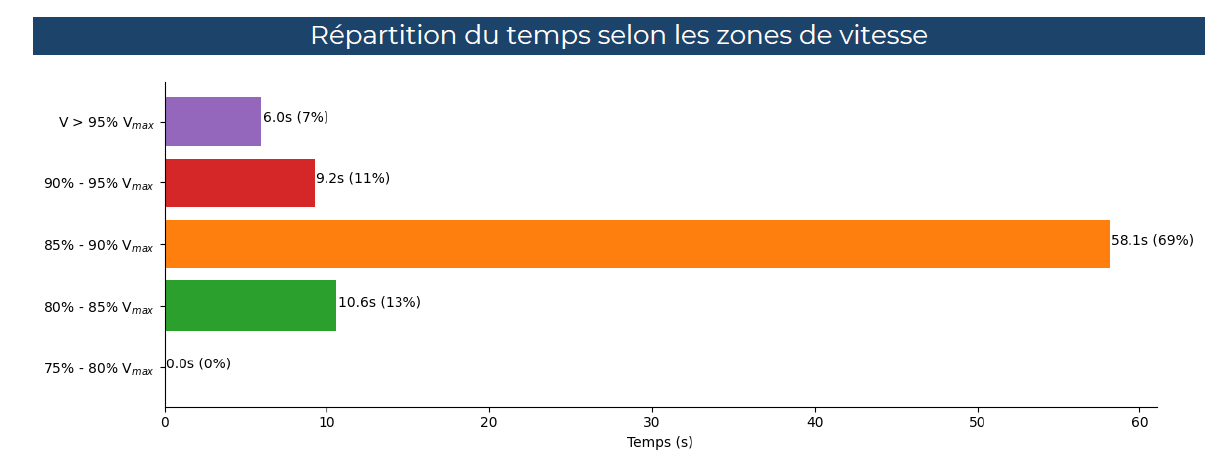
Ce graphique présente la répartition du temps passé dans les différentes zones de vitesse (définies à partir de la vitesse maximale). L’objectif est de passer le plus de temps possible dans les zones de vitesse proches de la vitesse maximale.
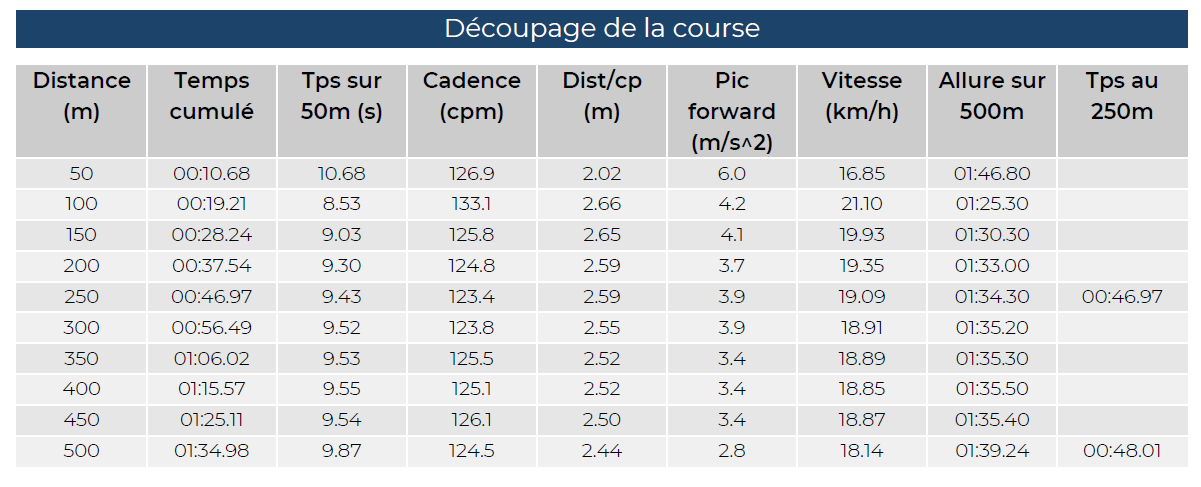
La course est divisée en segments (ici de 50m) et le tableau de Découpage de la course indique les valeurs moyennes des indicateurs sur chaque segment de course.
Remarque
Vous pouvez choisir la distance de découpage de votre choix dans l'application.
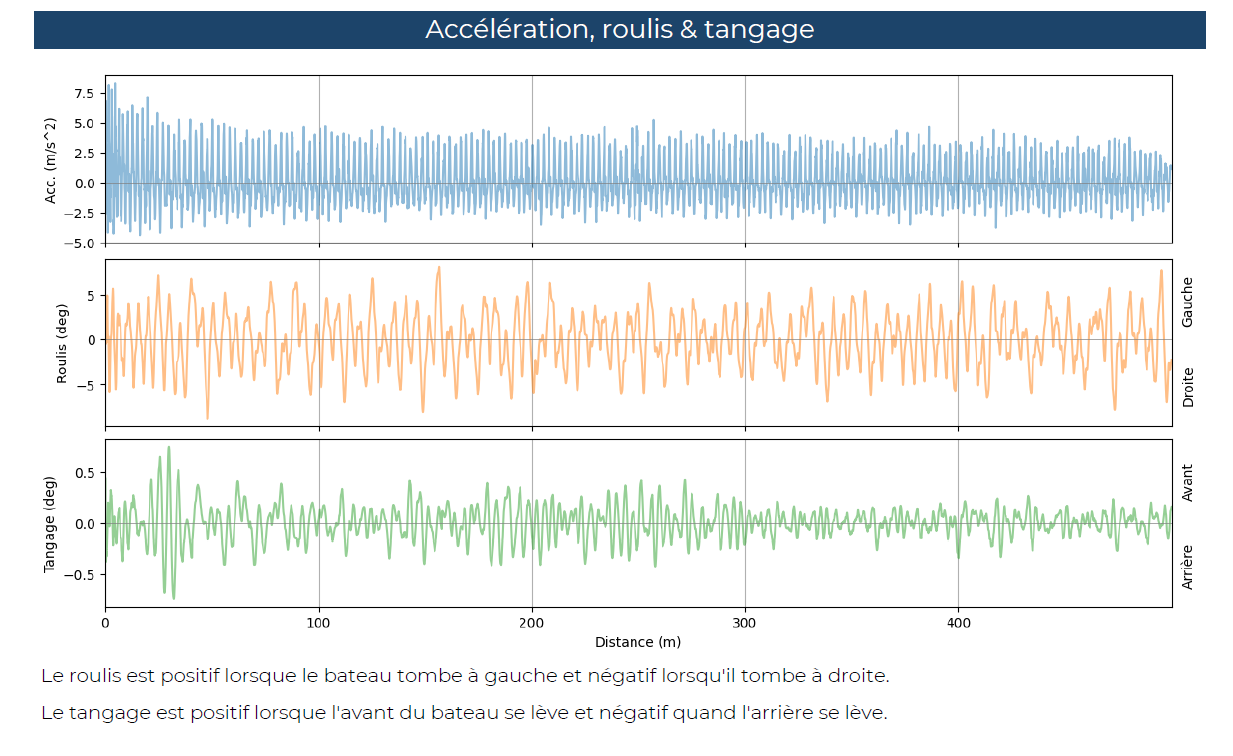
Les angles du bateau (roulis et tangage) sont mis en rapport avec le signal d'accélération du bateau. Plus le bateau est stable (variations du roulis et du tangage faibles), plus la friction sur la coque est faible.
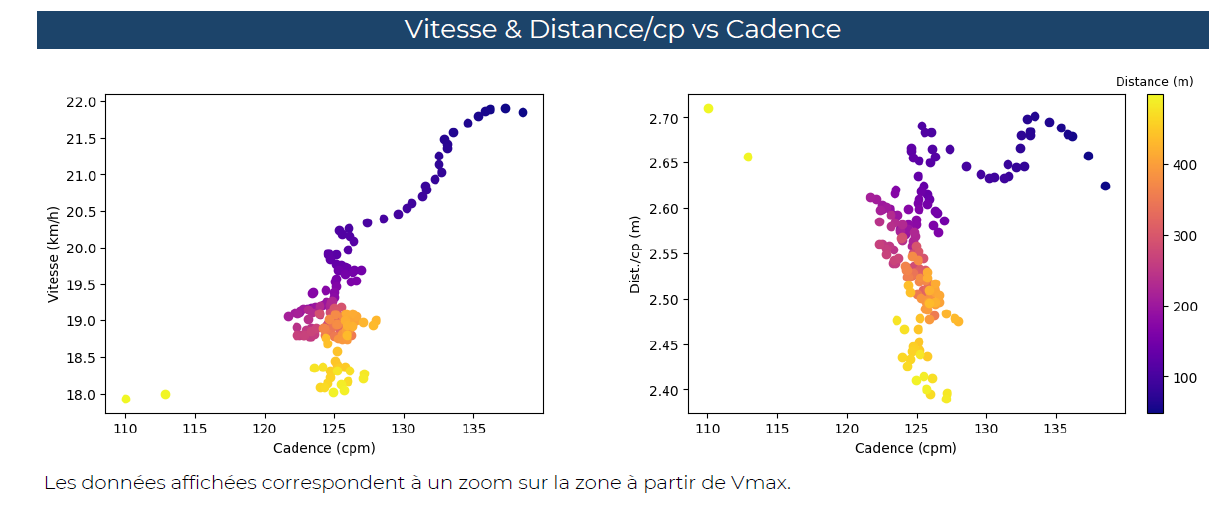
Ce graphe présente l'évolution des relations Vitesse vs Cadence et Distance par coup vs Cadence à partir du moment où la vitesse maximale a été atteinte.
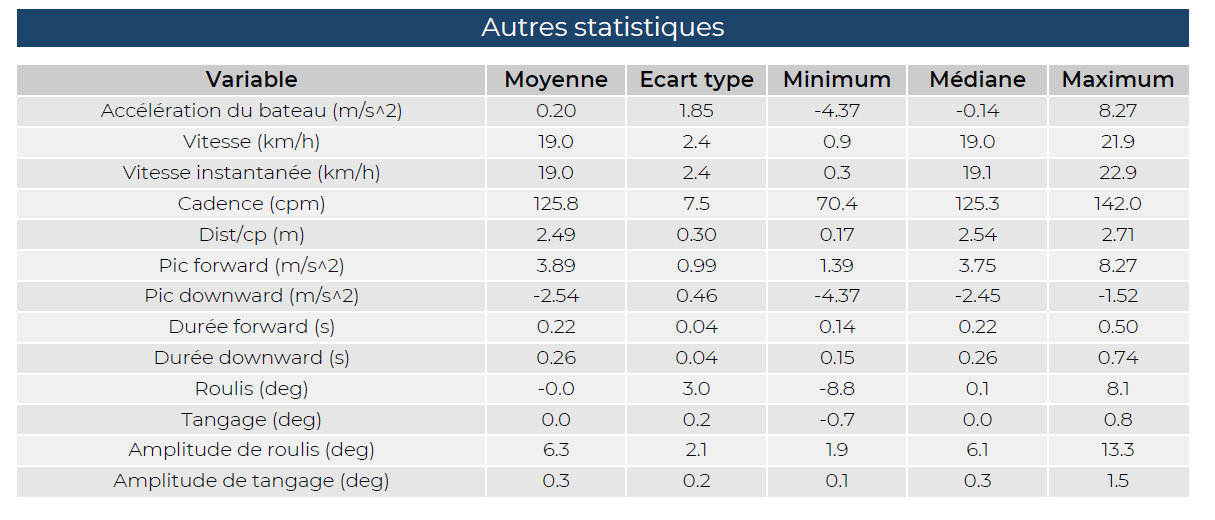
Ce tableau présente les statistiques détaillées (moyenne, écart-type, minimum, médiane et maximum) de chaque variable sur l'ensemble de la sélection choisie.