PI3D
PI3D
Introduction
Les PI3D (Pédales Instrumentées 3 axes) sont une solution intégrant des capteurs sans fil directement dans les pédales de vélo pour évaluer les forces d'interaction entre les pieds et les pédales. Ces pédales instrumentées mesurent avec précision les forces appliquées dans les trois directions, l’angle de la pédale et la cadence de pédalage. Ces mesures permettent une analyse approfondie et complète de la technique de pédalage, permettant le calcul de nombreux indicateurs, notamment l’efficacité de pédalage.
Caractéristiques principales
- Type de capteur : Capteur de force triaxial à jauges de contrainte
- Gamme de mesure: -100 à +100kg pour Fx et Fy, -450 à +450kg pour Fz
- Poids : 530g par pédale
- Matériaux : Aluminium
- Plage de température de fonctionnement : 0° à +40 °C
- Autonomie de la batterie : 2h
- Transfert de données : Bluetooth Low Energy (BLE)
- Synchronisation des données : 5 ms en BLE si enregistrement de plus de 15 secondes
- Compatibilité : Cales plate, Shimano et Look
- Accessoires inclus : Chargeur magnétique
Les PI3D sont dotées d’un filetage classique et s’adaptent à tous types de manivelles. Pensez à appliquer de la graisse sur le filetage avant le montage. L’application Phyling intègre des algorithmes spécialement développés pour les PI3D. Ils facilitent l’utilisation des pédales en traitant automatiquement les données pour fournir de nombreux indicateurs pertinents. Consultez la section Données pour en savoir plus sur les données calculées.
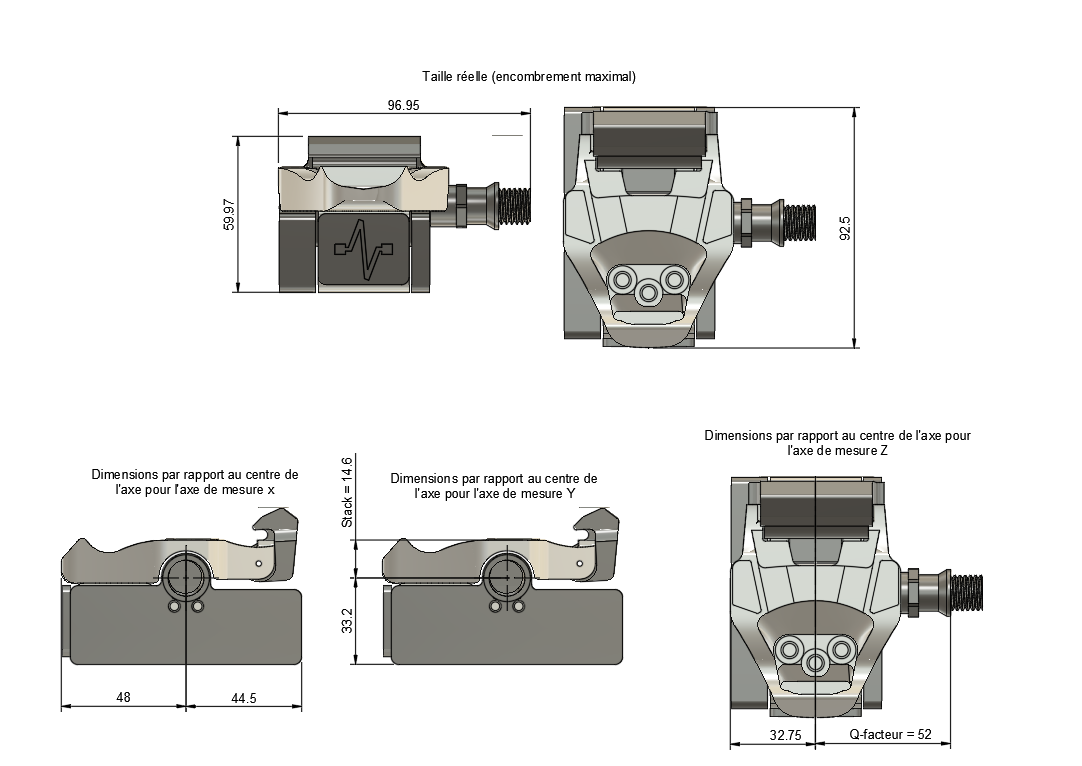
Pédale SHIMANO
- Q-facteur (entre la manivelle et le point d'application) : 52 mm
- Stack (entre le centre de l'axe et le point d'application) : 14,6 mm (+ hauteur de cale)
- Taille réelle (pour conditionnement) : 92,5 × 97 × 60,8 mm
Dimensions par rapport au centre de l'axe :
| Axe | Min | Max |
|---|---|---|
| X | -44,5 mm | +48 mm |
| Y | -52 mm | +32,75 mm |
| Z (point d'application) | -14,6 mm | — |
| Z (haut de l'assemblage) | -27,6 mm | +33,2 mm |
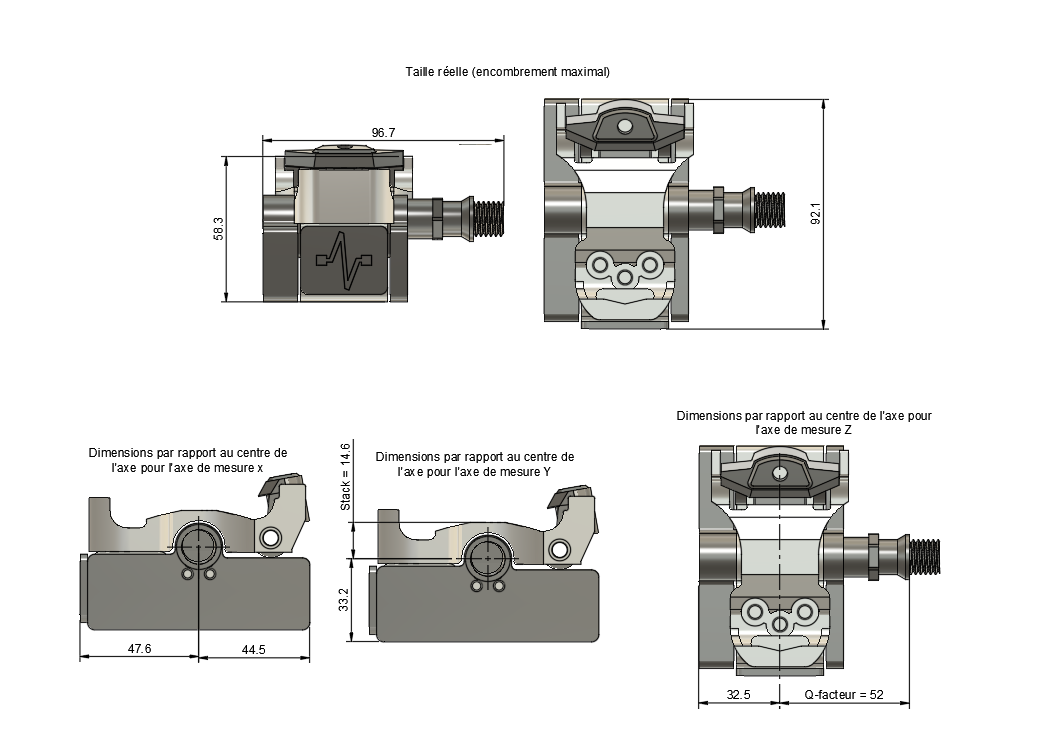
Pédale LOOK
- Q-facteur (entre la manivelle et le point d'application) : 52 mm
- Stack (entre le centre de l'axe et le point d'application) : 14,6 mm (+ hauteur de cale)
- Taille réelle (pour conditionnement) : 92,1 × 97 × 58,3 mm
Dimensions par rapport au centre de l'axe :
| Axe | Min | Max |
|---|---|---|
| X | -44,5 mm | +47,6 mm |
| Y | -52 mm | +32,5 mm |
| Z (point d'application) | -14,6 mm | — |
| Z (haut de l'assemblage) | -25 mm | +33,2 mm |
Notice d'utilisation
I. Mise en place des pédales
- Appliquez de la graisse sur le filetage de l’axe de la pédale et vissez les pédales sur les manivelles. Serrez avec un couple de 35 à 55 Nm.
- Débranchez les pédales avant utilisation et vérifiez qu’elles ne rencontrent pas de câbles ou d'autres obstacles dans leur course.
II. Calibration
Les PI3D disposent de deux procédures de calibration : l’une pour les offsets (c'est-à-dire les valeurs à vide des pédales) et l’autre pour la matrice de calibration (conversion des signaux de force en kg). Ces deux procédures sont distinctes.
Calibration des offsets
La calibration des offsets peut être réalisée régulièrement car cette valeur est sensible aux changements liés à la température, à la charge, ou encore au remontage des pédales. La procédure est simple et est guidée depuis l’interface de l’application Phyling via le module de calibration.
Procédure de calibration des offsets depuis le module de calibration de l’application Phyling
La procédure de calibration est lancée depuis l'application Phyling en choisissant la calibration "Tare pédales 3D". Les pédales doivent être connectées au Maxi-Phyling (cf. section Mode d'enregistrement via Bluetooth ci-dessous) Les instructions affichées à l'écran suivent ce déroulé:
- Une fois les pédales montées sur les manivelles, placez la première pédale et la manivelle vers l’avant à l’horizontal. Ne touchez pas à la pédale pendant 10 secondes.
- Placez le bloc capteur de la pédale à l’horizontal (parallèle à la manivelle) à l’aide d’un niveau à bulle précis (ou outil équivalent). Ne bougez pas pendant 5 secondes.
- Appliquez la calibration obtenue au Maxi-Phyling de la pédale.
- Répétez l'opération pour la deuxième pédale.
Calibration de la matrice
La matrice de calibration peut être mise à jour une fois par an à l’aide de masses étalonnées. Phyling accompagnera cette procédure. Le capteur PI3D est fixé à un banc d'étalonnage permettant de solliciter le capteur le long de chaque axe en plaçant des masses. Pour chaque axe, des paliers de force permettent d'obtenir la correspondance entre le signal numérique et la valeur en kg. Cette procédure permet également de quantifier les effets transverses des capteurs multi-axiaux.
III. Enregistrement des données
Chaque pédale PI3D est équipée d'un boitier d'acquisition Mini-Phyling V2 qui enregistre les données en local ou les transmet en temps réel en Bluetooth.
Mode d’enregistrement en local
Les PI3D sont dotées d’une mémoire interne, ce qui leur permet de réaliser un enregistrement en autonomie complète.
- Appuyez une demi-seconde sur le bouton ON pour allumer les pédales. La LED verte s’allume.
- Appuyez sur le bouton REC par un clic rapide pour déclencher la LED bleue, qui indique l’enregistrement des données. Répétez l’opération sur chaque pédale.
- Appuyez sur le bouton REC par un clic rapide pour stopper l’enregistrement. La LED repasse au vert.
- Exportez les données de chaque pédale en passant le Mini-Phyling des PI3D en mode USB par un appui long sur le bouton ON (Mini-Phyling éteint). Branchez ensuite le câble d’alimentation à un port USB de l'ordinateur. Le fichier se trouve dans le dossier DATA.
Synchronisation des pédales
Il est possible d’ajouter un système de synchronisation basique entre les deux pédales dans cette configuration d’enregistrement. Pour cela, effectuez au préalable un enregistrement avec les PI3D connectées au Maxi-Phyling pendant une durée de trente secondes. Cela permet de synchroniser l’heure interne des Mini-Phyling des pédales. Évitez d’éteindre les pédales après cette opération.
Attention
Nous ne garantissons pas une synchronisation aussi précise que celle obtenue avec l’enregistrement via Bluetooth.
Mode d’enregistrement via Bluetooth
Une connexion Bluetooth (BLE) est établie entre chaque pédale et le Maxi-Phyling. Celui-ci contrôle la synchronisation des pédales et l’enregistrement des données. Avec ce mode d’enregistrement, la synchronisation entre le Maxi-Phyling et les Mini-Phyling des pédales est inférieure à 5 ms.
- Allumez les PI3D et le Maxi-Phyling. La connexion s’établit automatiquement. La LED de chaque pédale et la LED du Maxi-Phyling cessent de clignoter lorsque la connexion pédale/Maxi-Phyling est établie.
- Appuyez sur le bouton REC du Maxi-Phyling pour démarrer l’enregistrement. La LED du Maxi-Phyling passe au bleu. Il est également possible de contrôler l’enregistrement depuis l’interface de l’application Phyling, dans l’onglet Temps réel du Hub.
- Appuyez à nouveau sur le bouton REC pour terminer l’enregistrement.
- Le Maxi-Phyling envoie automatiquement ses données au Hub. Sinon, utilisez le mode USB pour l'export des données comme décrit à l'étape 4 de la section précédente.
Visualisation temps réel
Lorsque les deux pédales sont connectées au Maxi-Phyling, l'application affiche en temps réel les variables de pédalage (forces, force tangentielle, efficacité, puissance totale, cadence, angle de manivelle) ainsi que les indicateurs synthétiques : puissance, puissance moyenne sur 3 s, cadence, efficacité moyenne et balance droite/gauche. Le calcul temps réel approche celui de l'analyse complète tout en restant causal (pas de filtrage non causal).
IV. Traitement des données
- Associer : Dans l’onglet Données, retrouvez les enregistrements associés à un athlète. Les données non-associées issues d’un enregistrement récent sont accessibles en cliquant sur le bouton NEW (en bleu). Cliquez sur un enregistrement pour l’associer.
- Visualiser : Cliquez sur un enregistrement associé pour visualiser les données, effectuer des sélections et exporter les données au format
csv.
Données
Les données enregistrées et calculées par le Maxi-Phyling fournissent des informations complètes sur l’efficacité de pédalage, les phases de poussée et de tirage, les forces appliquées selon chaque axe, ainsi que la puissance développée. Afin de tirer pleinement parti de ces données, Phyling rend accessibles les données brutes de chaque capteur. Phyling a également développé des analyses spécifiques pour calculer certains indicateurs.
Fréquences d'échantillonnage
| Capteur | Fréquence |
|---|---|
| Forces | 200 Hz |
| Gyroscope | 200 Hz |
| Capteur angulaire (magnétique) | 200 Hz |
Le tableau ci-dessous donne un descriptif des variables calculées, ainsi que la manière dont elles ont été obtenues. Les variables correspondant à la pédale gauche (resp. droite) ont un nom qui se termine en _g (resp. _d). Dans ce tableau, seules les descriptions des variables de la pédale gauche sont données, ainsi que les descriptions des variables obtenues par combinaison des 2 pédales.
| Indicateur | Description | Unité | Calcul |
|---|---|---|---|
| T | Temps | s | |
| T_norm | Temps normalisé par cycle | cycle | |
| Fx_g | Force x | kg | Donnée brute |
| Fy_g | Force y | kg | Donnée brute |
| Fz_g | Force z | kg | Donnée brute |
| gyro_p_l_g | Vitesse angulaire de la pédale dans le référentiel du labo | deg/s | Donnée brute |
| angle_p_m_g | Angle pédale/manivelle | deg | Donnée brute |
| gyro_p_m_g | Vitesse angulaire de la pédale/manivelle | deg/s | Donnée brute |
| gyro_m_l_g | Vitesse angulaire de la manivelle/labo | deg/s | Par combinaison de gyro_p_l_g et gyro_p_m_g |
| norm_g | Norme de la force | kg | |
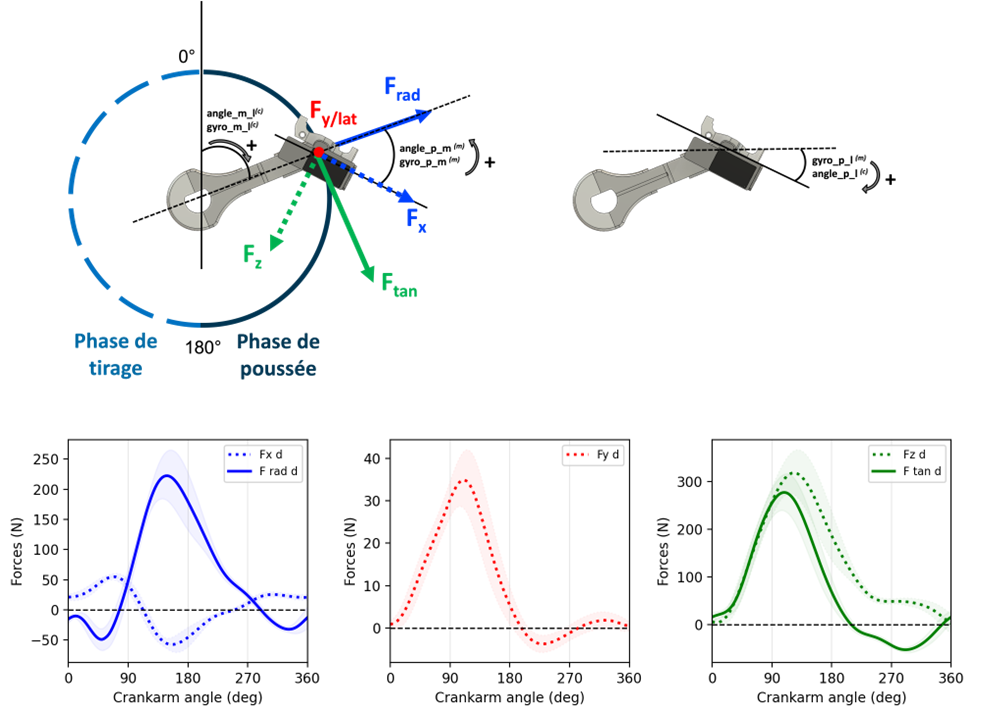
| Fr_g | Force radiale | kg | Par rotation des forces Fx_g, Fy_g, Fz_g en utilisant l'angle angle_p_m_g |
| Fl_g | Force latérale | kg | Par rotation des forces Fx_g, Fy_g, Fz_g en utilisant l'angle angle_p_m_g |
| Ft_g | Force tangentielle | kg | Par rotation des forces Fx_g, Fy_g, Fz_g en utilisant l'angle angle_p_m_g |
| Eff_g | Efficacité de pédalage | Ft_g / norm_g | |
| Eff_mean_g | Efficacité moyenne par cycle de pédalage | moy(abs(Eff)) | |
| Power_g | Puissance | W | Ft_g x gyro_m_l_g x long_maniv |
| Power_mean_g | Puissance moyenne par cycle de pédalage | W | moy(Power_g) |
| Power_push_g | Puissance moyenne sur la phase de poussée | W | |
| Power_pull_g | Puissance moyenne sur la phase de tirage | W | |
| Power | Puissance totale | W | Power_g + Power_d |
| Power_mean | Puissance totale moyenne | W | moy(Power) |
| Balance | Balance droite/gauche (part de la jambe droite, 50 % = équilibre) | % | moy(Power_d) / (moy(Power_g) + moy(Power_d)) x 100 |
| motif_id | Numéro du cycle de pédalage | Détection des cycles de pédalage à partir de l'angle angle_p_m_d | |
| Theta | Angle de la manivelle droite | deg | Par intégration de gyro_m_l_d |
| Phase | Phase du cycle de pédalage (poussée ou tirage) | 1 si Theta > 180, 0 sinon (Phase=1 : poussée à gauche, tirage à droite ; Phase=0 : poussée à droite, tirage à gauche) | |
| Cadence | Cadence | rpm | Simple conversion de gyro_m_l_g |
| Cadence_mean | Cadence moyenne | rpm | moy(Cadence) |
| timestamp | Timestamp depuis 1970 | s | A partir du temps du Maxi-Phyling |